Over time, I will include some FAQ on this page. For now, it is a vehicle to share information about extensive modifications which I have made to an X-Cell Gasser.
The following pictures show my new control system design for X-Cell helicopters.
Design objectives were:
CCPM 180 degree with optional 120 degree with correct geometry.
Light weight with extreme rigidity.
Produced from flat aluminum or carbon fiber.
Maximum use of stock frames and parts.
Allowance for mixture control servo.
The frame is a 'back bone' design. This ties the upper and lower frames together into a rigid structure.
The engine is mounted by it's front bosses into a solid mount which is connected to the back bone and the lower frames further adding to the rigidity and eliminating the need for a mount on the cylinder head.
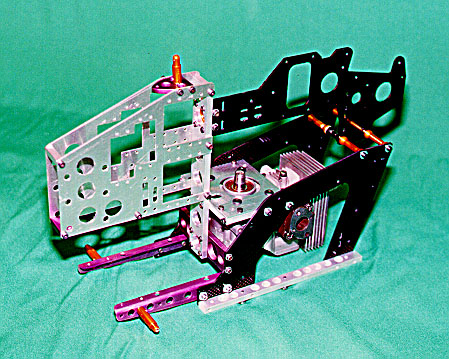
The linkages are arranged in a manner which results in zero distortion between the servo and the bell crank. That leaves only the bell crank to swash plate non-linear. The remaining effect from this is minimal.
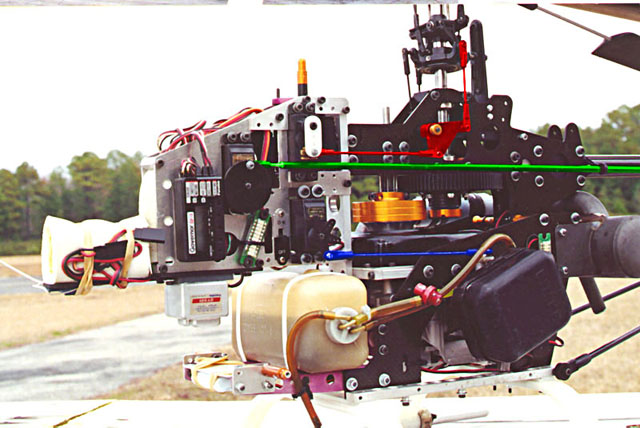
This example is 180 degree CCPM. The elevator has been kept separate in preparation for adding a gyro to this axis in a future project. The linkage arrangement on the elevator completely eliminates any elevator movement over the entire collective range.
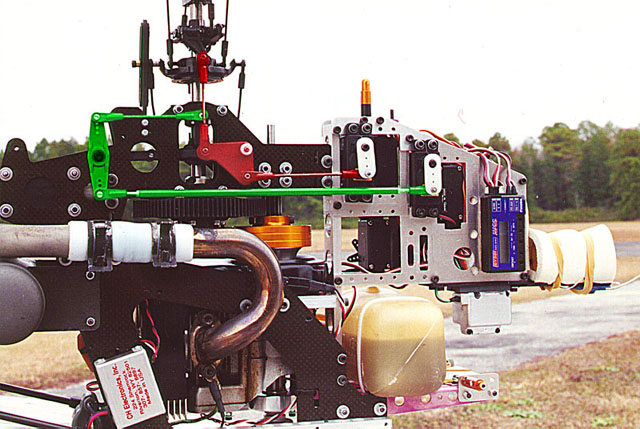
The Tail rotor servo is kept in the front where it is protected, does not require an extension lead, and helps to balance the normally tail heavy X-Cell.
I used a CAD system in the design so there are only a couple of couple of minor adjustments which need to be made to the prototype. After that I will send the patterns to a carbon fiber supplier who can CNC cut in small quantities from a CAD pattern. If the cost is reasonable, and there is enough interest, I will make the parts available.
I'll be adding more info about this new frame and about helicopters in general as I find time and motivation.
Feel free to e-mail me with any questions: simpsons34@cox.net